Данная программа позволяет управлять одним двигателем с помощью трех кнопок для движения вперед, назад и остановки. Код также интегрирован с ROS 2 для возможного расширения функциональности и интеграции с другими системами.
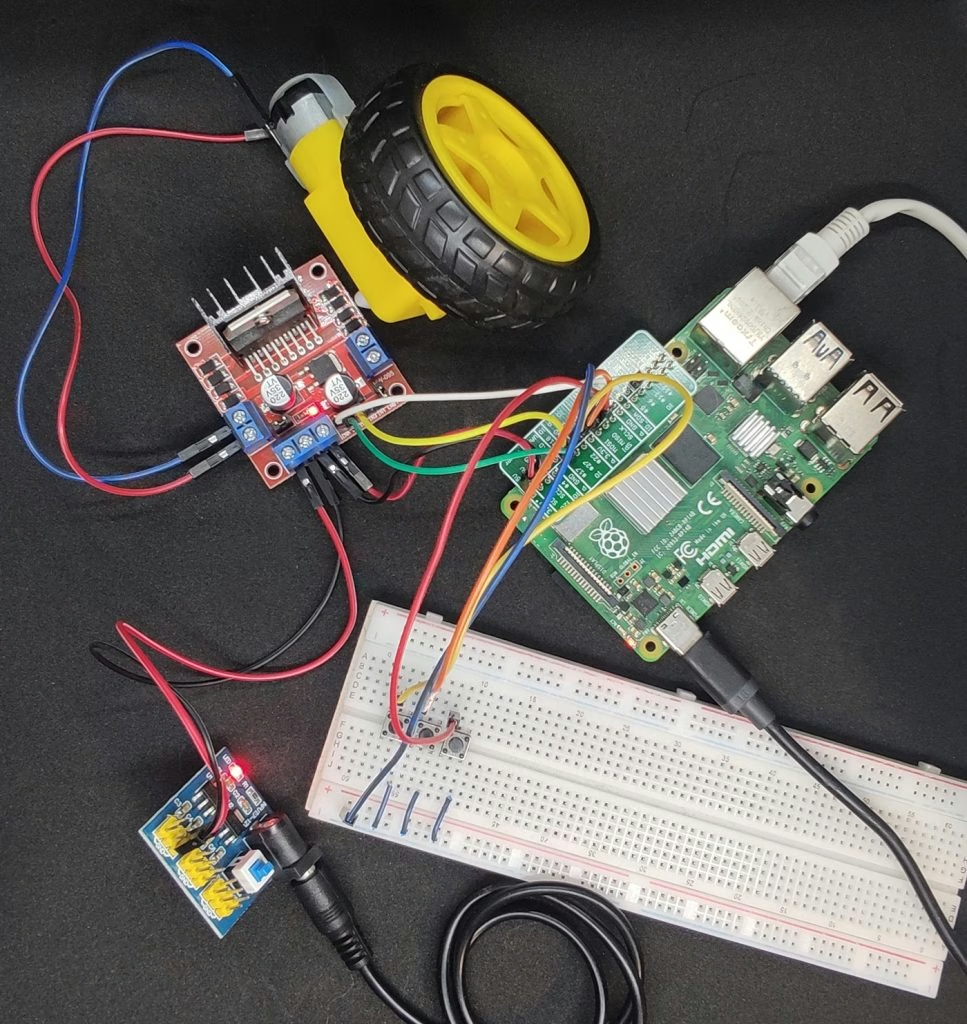
Схема подключения
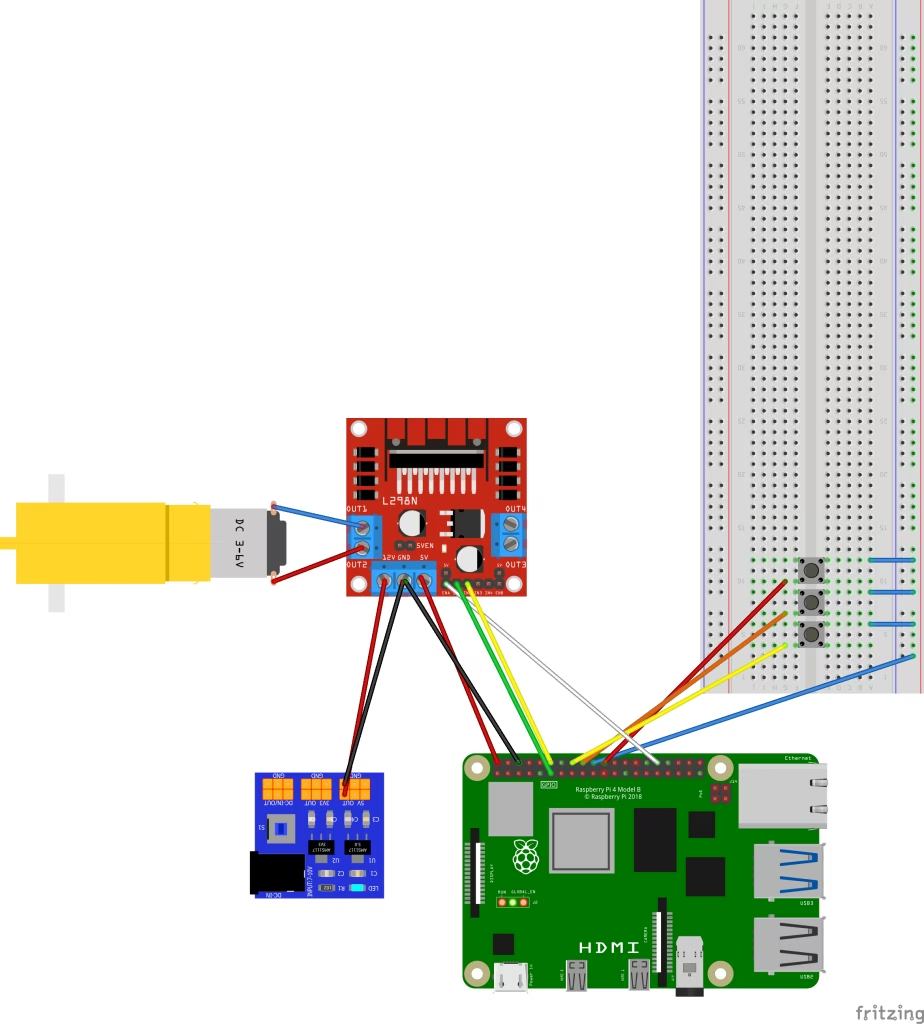
Схема подключения: RPI, L298N, TT мотор, питание, кнопкиФото
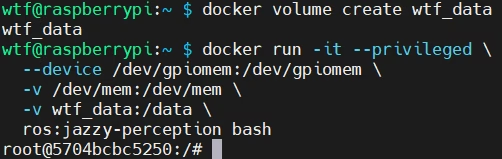
Создание тома Docker и запуск контейнера
Создадим том, где будут сохраняться данные, иначе при выходе из Докера данные (установленные библиотеки, проекты и пр.) пропадут.
# Создадим том
docker volume create wtf_data
# Запустим контейнер с подключенным томом
docker run -it --privileged \
--device /dev/gpiomem:/dev/gpiomem \
-v /dev/mem:/dev/mem \
-v wtf_data:/data \
ros:jazzy-perception bash
# Теперь все данные, сохраненные в /data внутри контейнера,
# будут сохранены даже после остановки контейнера
Создание пакета ROS2
Для использования этого кода в ROS2, нужно создать пакет. Вот как это сделать:Создадим рабочую директорию ROS2:
mkdir -p /data/wtf/src
cd /data/wtf/src
Создадим пакет:
ros2 pkg create --build-type ament_python motor_control
- ament_python — это тип системы сборки, используемый в ROS 2 для создания и управления пакетами на языке Python.
Установим редакторnano, если он не установлен:
sudo apt update
apt install nano
Поместим код в файл motor_controller.py
sudo nano /data/wtf/src/motor_control/motor_control/motor_controller.py
Код:
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
import rclpy
from rclpy.node import Node
import RPi.GPIO as GPIO
import time
class MotorController(Node):
def __init__(self):
super().__init__('motor_controller')
# Настройка GPIO
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
# Пины для драйвера L298N
self.in1_pin = 17 # Управление направлением 1
self.in2_pin = 18 # Управление направлением 2
self.ena_pin = 12 # Включение/выключение двигателя
# Пины для кнопок
self.forward_button_pin = 23 # Кнопка движения вперед
self.stop_button_pin = 24 # Кнопка остановки
self.backward_button_pin = 25 # Кнопка движения назад
# Настройка пинов драйвера как выходов
GPIO.setup(self.in1_pin, GPIO.OUT)
GPIO.setup(self.in2_pin, GPIO.OUT)
GPIO.setup(self.ena_pin, GPIO.OUT)
# Настройка пинов кнопок как входов с подтягивающими резисторами
GPIO.setup(self.forward_button_pin, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.setup(self.stop_button_pin, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.setup(self.backward_button_pin, GPIO.IN, pull_up_down=GPIO.PUD_UP)
# Добавление обработчиков событий для кнопок
GPIO.add_event_detect(
self.forward_button_pin,
GPIO.FALLING,
callback=self.forward_button_callback,
bouncetime=300
)
GPIO.add_event_detect(
self.stop_button_pin,
GPIO.FALLING,
callback=self.stop_button_callback,
bouncetime=300
)
GPIO.add_event_detect(
self.backward_button_pin,
GPIO.FALLING,
callback=self.backward_button_callback,
bouncetime=300
)
# Создание таймера для периодической публикации состояния
self.timer = self.create_timer(1.0, self.timer_callback)
self.get_logger().info('Контроллер двигателя инициализирован')
# Начальное состояние - остановлен
self.stop_motor()
def forward_button_callback(self, channel):
self.get_logger().info('Нажата кнопка ВПЕРЕД')
self.move_forward()
def stop_button_callback(self, channel):
self.get_logger().info('Нажата кнопка СТОП')
self.stop_motor()
def backward_button_callback(self, channel):
self.get_logger().info('Нажата кнопка НАЗАД')
self.move_backward()
def move_forward(self):
self.get_logger().info('Двигатель движется вперед')
GPIO.output(self.ena_pin, GPIO.HIGH) # Включить двигатель
GPIO.output(self.in1_pin, GPIO.HIGH) # Установить направление вперед
GPIO.output(self.in2_pin, GPIO.LOW)
def stop_motor(self):
self.get_logger().info('Двигатель остановлен')
GPIO.output(self.ena_pin, GPIO.LOW) # Выключить двигатель
GPIO.output(self.in1_pin, GPIO.LOW)
GPIO.output(self.in2_pin, GPIO.LOW)
def move_backward(self):
self.get_logger().info('Двигатель движется назад')
GPIO.output(self.ena_pin, GPIO.HIGH) # Включить двигатель
GPIO.output(self.in1_pin, GPIO.LOW) # Установить направление назад
GPIO.output(self.in2_pin, GPIO.HIGH)
def timer_callback(self):
# Здесь можно добавить публикацию состояния двигателя, если необходимо
pass
def __del__(self):
# Очистка при завершении
GPIO.cleanup()
def main(args=None):
rclpy.init(args=args)
motor_controller = MotorController()
try:
rclpy.spin(motor_controller)
except KeyboardInterrupt:
pass
finally:
motor_controller.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
Установим библитеку python3-rpi-lgpio:
sudo apt install python3-rpi-lgpio
Откроем setup.py:
from setuptools import setup, find_packages
setup(
name="motor_control",
version="0.1.0",
packages=find_packages(),
)
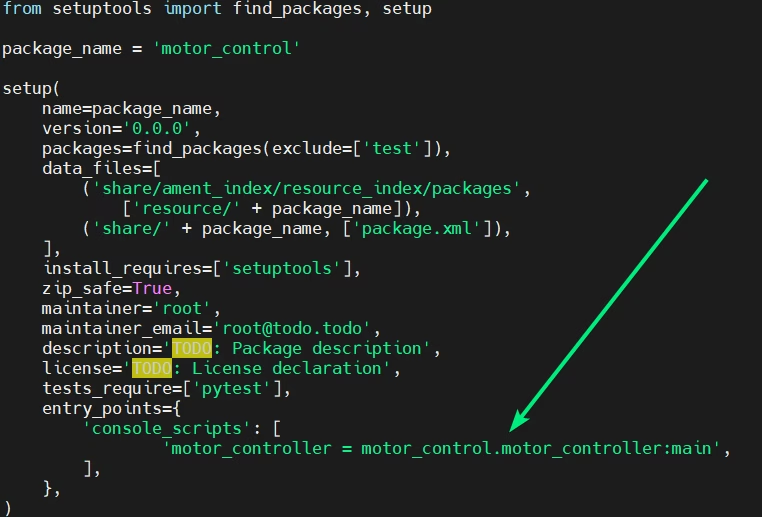
И добавим 'motor_controller = motor_control.motor_controller:main':
entry_points={
'console_scripts': [
'motor_controller = motor_control.motor_controller:main',
],
},
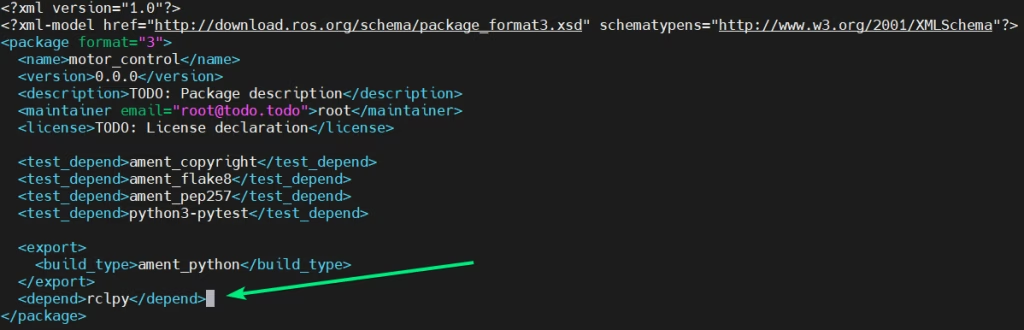
Откроем package.xml:
nano motor_control/package.xml
И добавим:
rclpy
Соберем пакет:
cd /data/wtf
colcon build --packages-select motor_control
source install/setup.bash

запустим код:
ros2 run motor_control motor_controller

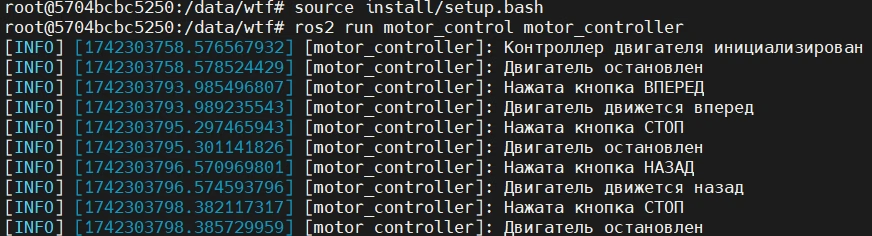
Результат работы
Нажатия на кнопки: