ROS2 — это вторая версия фреймворка Robot Operating System, который представляет собой набор программных библиотек и инструментов для разработки программного обеспечения для роботов.Установить ROS2 на Windows можно двумя способами:
1. Установить VirtulaBox
1. Установить Ubuntu в VirtualBox
1. Установить ROS2 в Ubuntu
или
1. Установить WSL (Windows Subsystem for Linux)
1. Установить Ubuntu с помощью WSL
1. Установить ROS2 в Ubuntu
Установка VirtualBox
Скачаем и установим последнюю версию VirtulalBox.
Установка Ubuntu
Какую версию качать? Документация говорит Ubuntu 24.04. Качаем 24.04 LTS.Открываем VirtualBox, кликаем на Создать
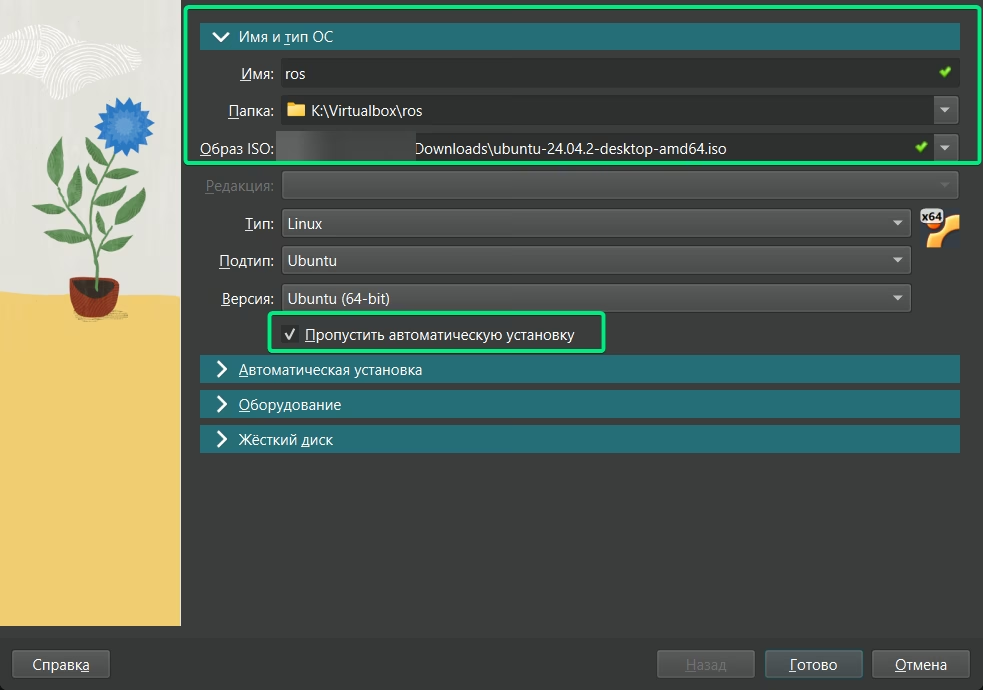
Создание виртуальной машиныЗаполняем поля Имя, выбираем путь установки и образ ISO. Пропускаем автоматическую установку
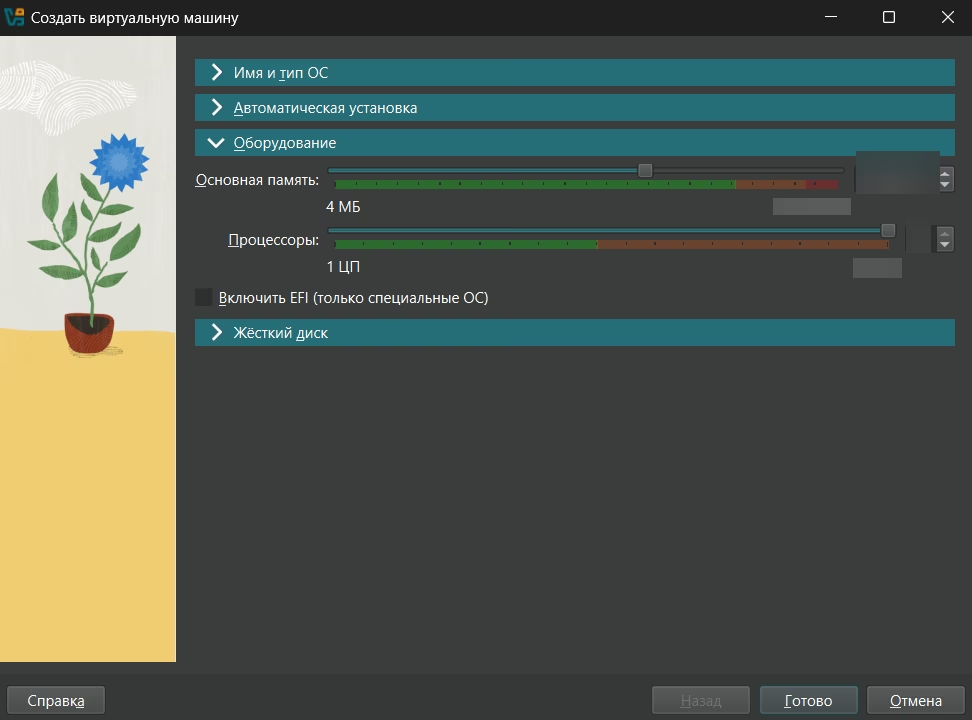
Выбор ОСВыбираем количество доступной ОС памяти и количество потоков ЦП.
Выделяем место на жестком диске:
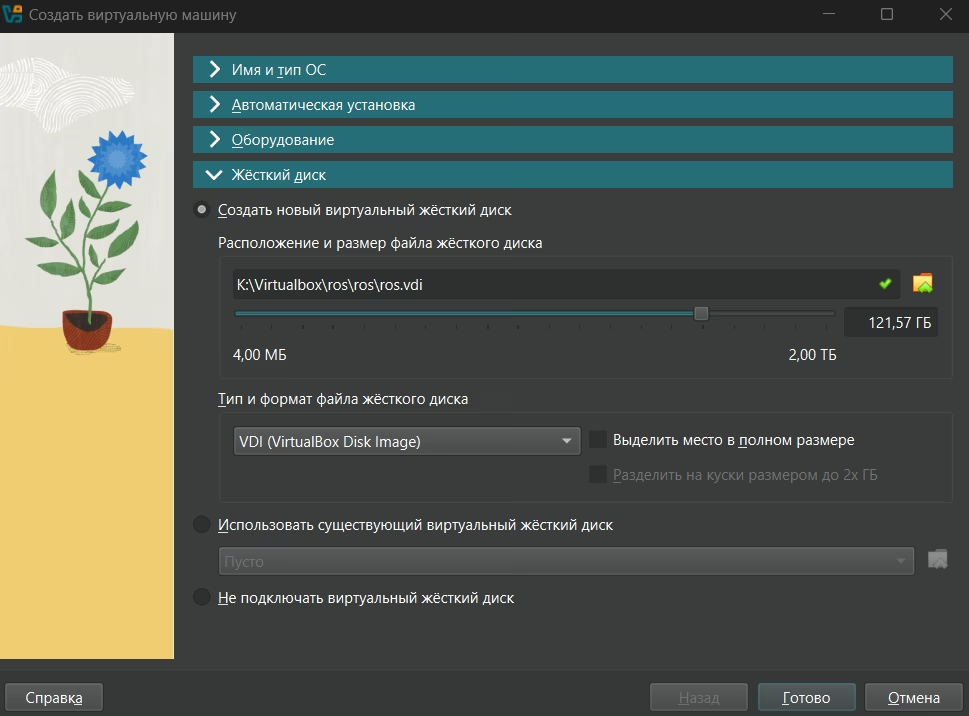
Нажимаем на кнопку Готово. Затем нажимаем на Запустить.
Затем на Показать.
Черный экран… ждем какое-то количество времени.
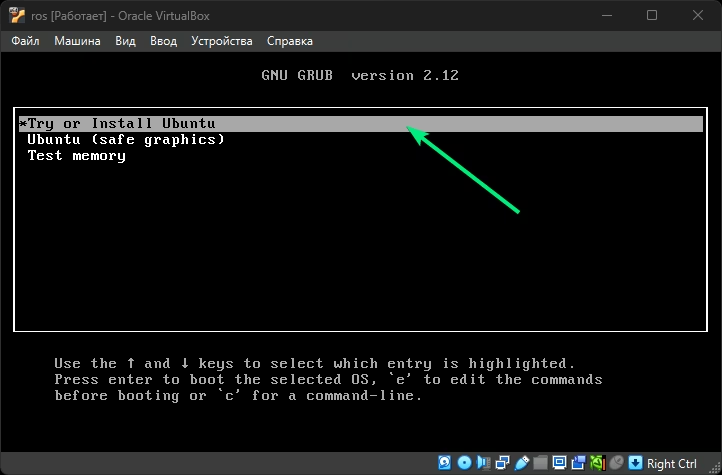
Выбираем Install Ubuntu.
Выбираем английский язык.
Выбираем Install Ubuntu.
Выбираем Ручную установку.
Выбираем Erase disk.
Создаем логин и пароль
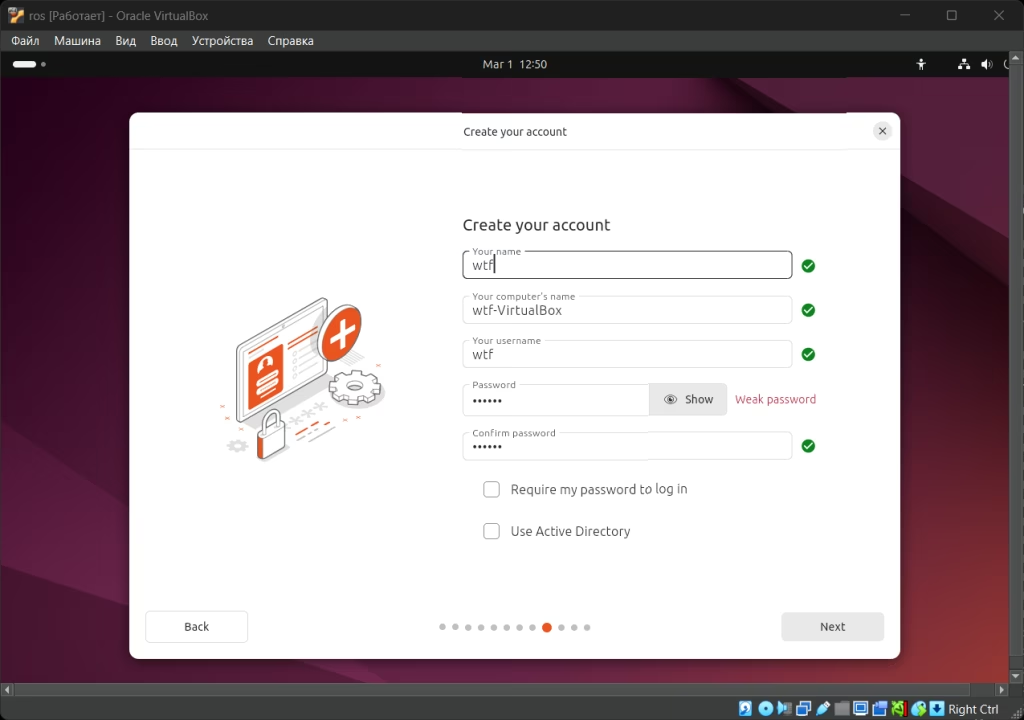
Создание логина и пароля UbuntuНажимаем на Install.
Перезагрузимся.
Установка Ubuntu с помощью WSL
Если WSL не установлен, установим его:
wsl --install
Чтобы установить Ubuntu, введем в PowerShell:
wsl --install -d Ubuntu-24.04
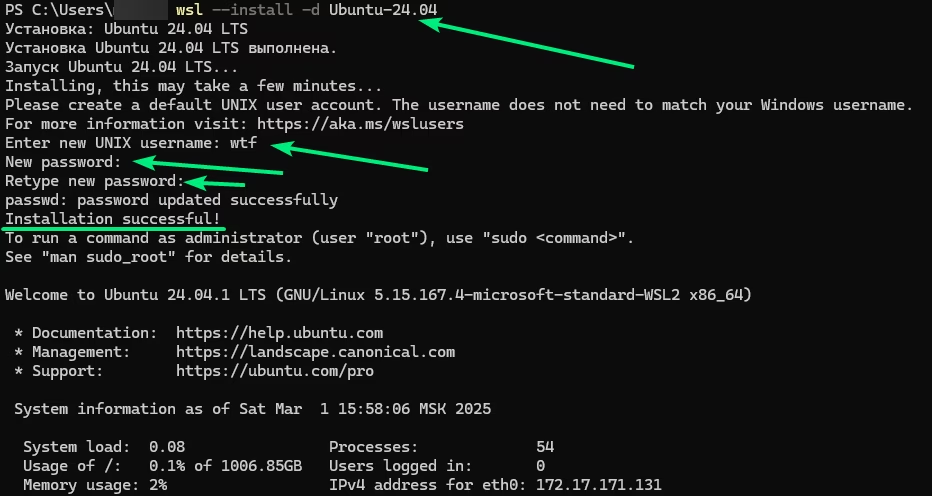
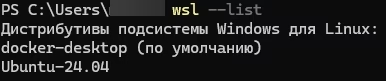
Установка Ubuntu ы WSLУзнаем список доступных дистрибутивов:
wsl -l -v
Запустим Ubuntu командой:
wsl -d Ubuntu-24.04
Установка ROS2 на Ubuntu
Убедимся, что у нас установлена локаль с поддержкой UTF-8:
locale # check for UTF-8
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
locale # verify settings
Подключение необходимых репозиториев
Убедимся, что репозиторий Ubuntu Universe включен:
sudo apt install software-properties-common
sudo add-apt-repository universe
Теперь добавьте GPG-ключ ROS 2 с помощью apt:
sudo apt update && sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key \
-o /usr/share/keyrings/ros-archive-keyring.gpg
Добавим репозиторий в список источников:
Установка инструментов разработки (опционально)
Если вы собираетесь создавать пакеты ROS или заниматься разработкой, вы также можете установить инструменты разработки:
sudo apt update && sudo apt install ros-dev-tools
Установка ROS 2
Обновим кэш репозиториев apt после настройки репозиториев:
sudo apt update
Обновим систему:
sudo apt upgrade
Полная установка (рекомендуется): ROS, RViz, демонстрации, учебные материалы:
sudo apt install ros-jazzy-desktop
Или базовая установка ROS (минимальная): библиотеки коммуникации, пакеты сообщений, инструменты командной строки. Без графических инструментов:
sudo apt install ros-jazzy-ros-base
Подключение файлов настройки
Нужно выполнять эту команду при каждом открытии нового окна терминала, чтобы получить доступ к командам ROS 2:
source /opt/ros/jazzy/setup.bash
Точная команда зависит от того, куда вы установили ROS 2. Если у вас возникают проблемы, убедитесь, что путь к файлу ведет к вашей установке.Если вы не хотите выполнять команду source для файла настройки каждый раз при открытии нового окна терминала, вы можете добавить эту команду в скрипт запуска оболочки:
echo "source /opt/ros/jazzy/setup.bash" >> ~/.bashrc